

Рассматривается моделирование кривошипно-ползунного механизма (КПМ). В качестве звеньев используются параллелепипеды, сечением 10х10 разной длины.Модель звена Custom Link сделана в соответствии с этим материалом. Модель можно использовать при создании маятника по инструкции на этой странице. Создана библиотека CustomLinkLibrary и модель звена размещена в ней. Для работы, нужно открывать и файл модели SliderCrankMechanism и библиотеку CustomLinkLibrary.
Модель звена представляет собой твердое тело в форме вытянутого прямоугольного параллелепипеда, в середине которого его СК. Ещё две СК, жестко связанные при помощи Rigid Transform с центральной, определяют положение узлов звена, которые соединяются шарнирно с другими звеньями при сборке механизмов. Две узловые СК — это Follower-ы у двух блоков Rigid Transform. Base обоих преобразований Rigid Transform — это центральная СК твердого тела. Модель сгруппирована в подсистему. На подсистему сделана маска с заданием параметров. Поэтому двойной щелчок на блоке CustomLink приводит к появлению окна параметров. Ниже показана схема звена и окно настройки его параметров. Задание маски на подсистему описано в инструкции по первой из вышеуказанных ссылок.
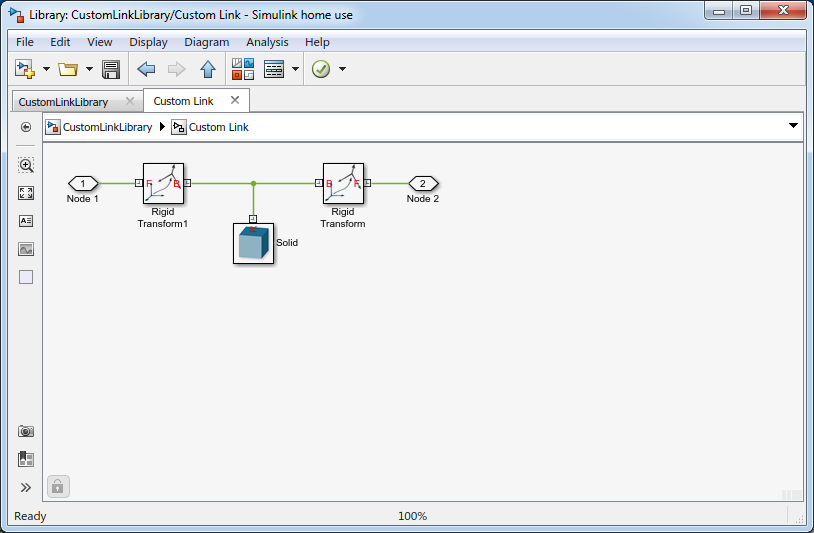

Схема механизма состоит из трех звеньев: кривошип (CustomLink L=50), шатун (CustomLink L=180) и ползун (CustomLink L=30). Звенья соединены между собой узлами вращения (Revolute Joint 1 и Revolute Joint 2). Кривошип соединен с землей узлом вращения Revolute Joint. Ползун соединен с землей призматическим узлом скольжения Prismatic Joint. Следует обратить внимание на то, что Prismatic Joint осуществляет совмещение осей Z систем координат, расположенных в сопрягаемых узловых точках звеньев. Скольжение осуществляется в направлении оси Z. Поэтому с обеих сторон блока Prismatic Joint установлены преобразователи СК — Rigid Transform и Rigid Transform 1, настроенные так, чтобы новая СК была направлена осью Z в направлении оси Х мировой СК и оси X ползуна.
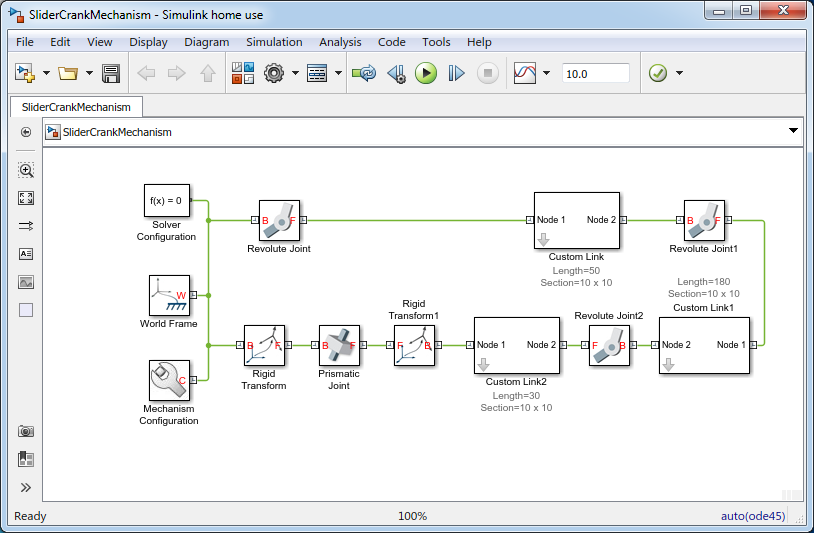
Механизм двигается под воздействием силы тяжести. Ось действия силы тяжести Y (настраивается в блоке Mechanism Configuration). Блок Revolute Joint имеет демпфирование 0,001 (Н·м/(градус/сек)) для замедления работы механизма.
