

Устойчивость может быть статическая и динамическая. Модель самолета должна быть, как минимум, статически устойчивой, чтобы летать вне зависимости от тяги двигателя. Ниже рассматривается устойчивость модели самолета в XFLR5. Модель с нулевой тягой, то есть без двигателя. В приложении — файл проекта.
Устойчивость модели самолета в XFLR5 — файл проекта XFL
Скачать файл проекта: CGSampleProject
Статическая устойчивость
Если самолет движется равномерно и прямолинейно, то его можно рассматривать как тело в равновесии. Устойчивость статическая – это способность тела находящегося в равновесии или системы, находящейся в равновесии, восстанавливать состояние равновесия после воздействия на тело (систему) некоторого возмущения, например порыва ветра. Статическая устойчивость выражается в том, что при выведении самолета из состояния равновесия, должны возникнуть моменты, стремящиеся вернуть самолет в исходное положение ([7] стр.19).
Рассматривается два типа статической устойчивости – продольная и поперечная. При рассмотрении статической устойчивости всё ограничивается школьной математикой. Кроме того, при конструировании, обеспечить самолету статическую устойчивость за счет центровки и элементов оперения относительно просто, по сравнению с обеспечением устойчивости динамической о которой речь пойдет далее.
Динамическая устойчивость
Можно рассмотреть теперь более сложную картину. Как именно устойчивый самолет с течением времени придет к состоянию, в котором он был до воздействия возмущения? Очевидно, будет колебательный затухающий процесс. То есть возникшие возвращающие моменты должны возникнуть так, чтобы не вызвать ещё большую раскачку.
Математика в динамике сложнее. Даже для простейшей пружинки с демпфером уже требуется дифференциальное уравнение второго порядка ([6] стр.114). Рассматривая движение самолета, здесь, как и в случае со статической устойчивостью, выделяют два направления: продольное и боковое. При этом, рассмотрение уравнений сводится к определению типов движения, иногда называемых модами (mode).
Независимо от того продольное или боковое движение, алгоритм исследования в теории общий. Формируется набор уравнений, линеаризуется, строится характеристический полином, анализируются его корни, величина действительной и мнимой части корней ([3] стр. 54 или [5] стр. 263-265 или [7] стр.42). В результате изысканий оказывается, что продольное движение самолета после возмущения со временем развивается по закону, сформированному двумя движениями – короткопериодическим и длиннопериодическим (фугоидным).
Короткопериодическое движение быстро затухает, но может быть неприятным. Длиннопериодическое движение происходит с периодом в десятки секунд. Движение по маршруту, порывы ветра и тому подобное требуют больше усилий от летчика или системы управления, нежели чем длиннопериодическая составляющая возмущенного движения. Длиннопериодическое движение не заметно, как не заметна и неустойчивость такого движения.
Короткопериодическое продольное возмущенное движение заключается в раскачке самолета вокруг центра масс. Длиннопериодическое выражено в колебаниях центра масс в вертикальной продольной плоскости. [1] (стр. 274, 275). Короткопериодическое движение происходит с почти постоянной скоростью, а длиннопериодическое — с почти постоянным углом атаки. Очень наглядный рисунок есть в книге [3] на стр. 65 и [6] на стр.125.
У характеристического уравнения 4 комплексных корня: пара с большими мнимыми частями и пара с большими действительными частями (см. пример в книге [6] стр.134). Чтобы самолет был динамически устойчив, вещественные корни или вещественные части корней должны быть отрицательными ([7] стр. 43-44).
Аналогично, при рассмотрении бокового движения тоже строятся уравнения, определяется характеристический полином. При боковом движении тоже есть моды, то есть типы движения. Здесь возникают такие типы движения, как спиральное (spiral mode) или голландский шаг (dutch roll). [2] (стр. 157, 158), [3] (стр. 305, 310).
Практика в XFLR5 — Статическая устойчивость
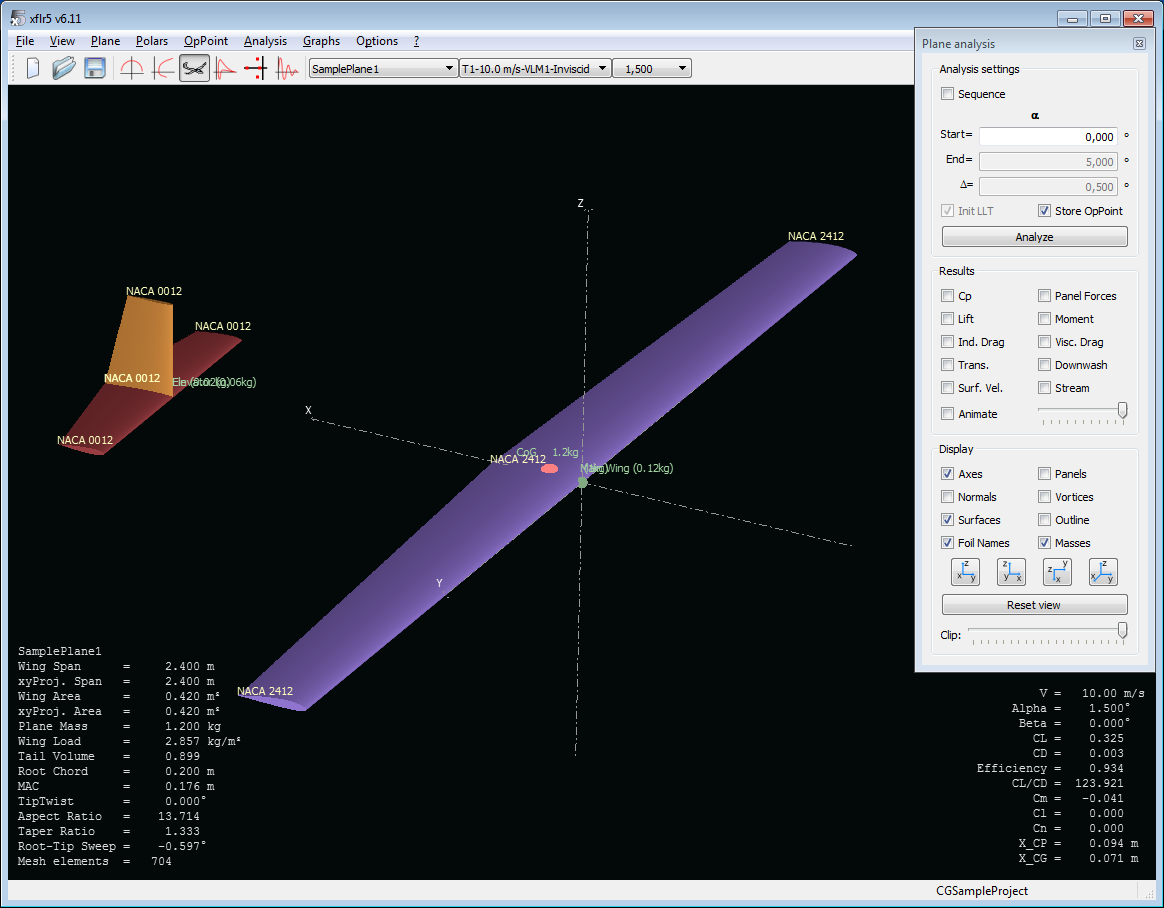
Модель сделана так, что центр тяжести находится перед Neutral Point (NP это аэродинамический фокус самолета). Таким образом выполнено условие статической устойчивости в продольном направлении — по тангажу.
Для проверки соответствия критерию статической устойчивости по тангажу, следует смотреть графики анализа первого типа в Polar View (F8):

Критерием статической устойчивости по тангажу является отрицательный наклон кривой Cm(Alpha) ([7] стр.20). Он показан стрелкой. И, коль скоро речь зашла о критериях в статике, то самолет должен обладать ещё одним свойством: коэффициент подъемной силы при нулевом моменте должен быть больше нуля — это для полетов на положительных углах атаки (см. [6] стр.43 или [4] стр.18).
Схожий график вместе с нелинейной частью можно видеть в [4] на стр.7 (график слева).
Когда наклон кривой Cm(Alpha) не отрицательный, скорее всего, требуется изменять расположение центра масс. Это делается за счет изменения координат балансировочных грузов или элементов конструкции модели.
Разумеется, если признаков статической устойчивости нет, то анализ 7-го типа (на динамическую устойчивость) выдаст ошибку.
В случае, если графика Cm(Alpha) по-умолчанию нет в Polar View, то его можно создать кликнув дважды на любом графике и выбрав нужные переменные для отображения на осях X и Y.
Таким же образом статическую устойчивость бокового движения по результатам анализа первого типа проанализировать в XFLR5 не выйдет, т.к. при выборе переменных для отображения на графике, угол скольжения выбрать нельзя.
Практика в XFLR5 — Динамическая устойчивость
Для анализа устойчивости динамической используется анализ 7-го типа (Analysis — Define a Stability Anallysis (Shift+F6)). В приложенном к статье проекте есть два сформированных и решенных программой анализа: 1-го типа и 7-го.
Для 7-го типа анализа следует задавать инерционные характеристики самолета. Достаточно задать геометрию крыла, оперения и массы. Моменты инерции задавать не надо, программа считает их в автоматическом режиме (разумеется, приблизительно).
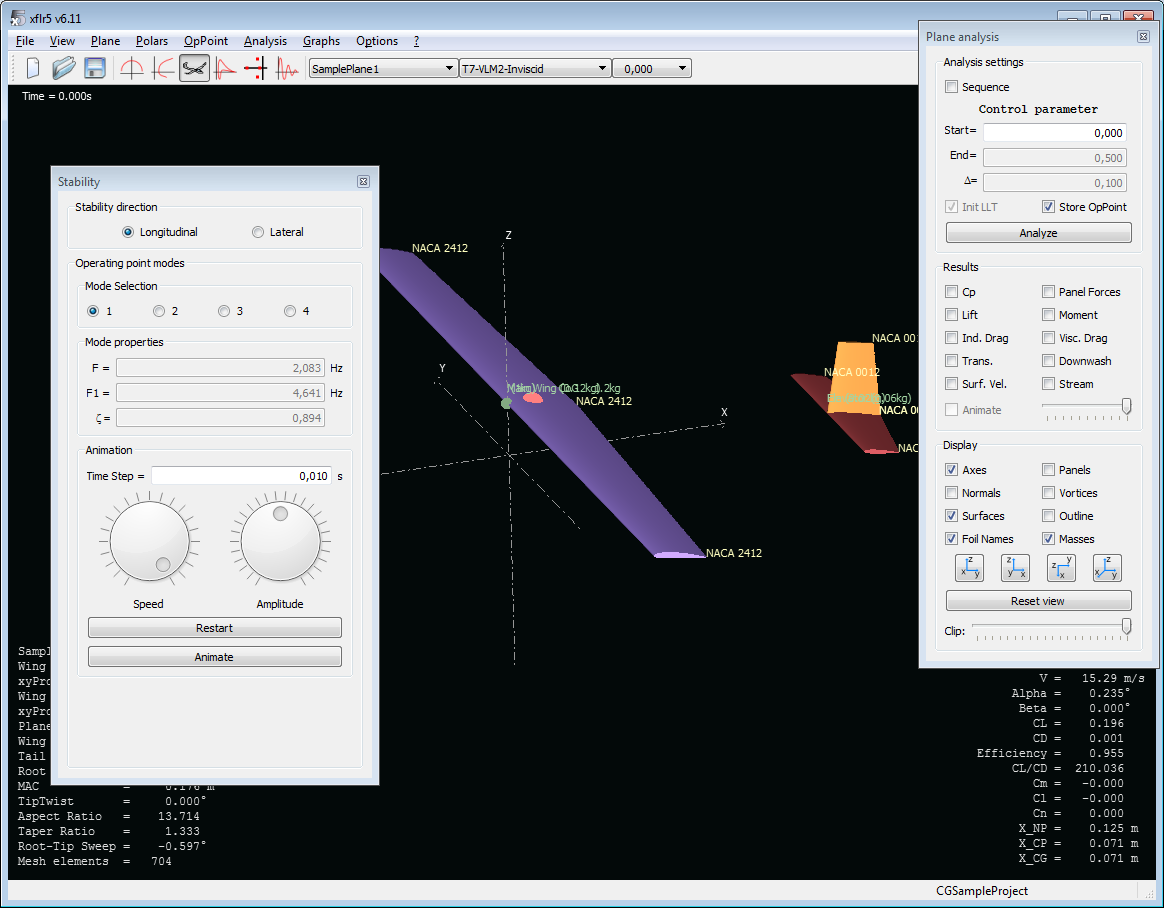
Результаты можно просматривать в виде анимации мод (на панели видов выбран Plane View и нужный тип анализа T7):
Либо на комплексной плоскости (в панели видов вместо Plane View выбран Root Locus View):

Ссылки, литература
[1] Л.Ф. Николаев — Аэродинамика и динамика полета транспортных самолетов (1990).
[2] Т. фон Карман — Аэродинамика. Избранные темы в их историческом развитии. (2001)
[3] В.Н. Медников — Динамика полета и пилотирование самолетов (1976)
[4] A.Deperrois — XFLR5 and Stability analysis. (2010)
[5] А.Ф. Бочкарев, В.В. Андреевский, В.М. Белоконов, В.И. Климов, В.М. Турапин — Аэромеханика самолета. Динамика полета (изд.2, 1985)
[6] Robert C. Nelsow — Flight stability and automatic control (1989)
[7] С.В. Богославский, А.Д. Дорофеев — Динамика полета летательных аппаратов (2002)
32-битная версия XFLR5
При работе на старых компьютерах, может понадобиться 32-битная версия XFLR5. Версия довольно старая — 6.11, но сносно работает на 32-битной ОС. Качал со страницы Sourceforge. Все более новые версии теперь 64-битные.
Денис, добрый день!
Я к Вам уже обращался ранее.
У меня вопрос про влияние центра тяжести на статическую устойчивость летательного аппарата.
Насколько я понимаю, на прямолинейный полет ЛА влияет и расположение центра тяжести, возможно и значение массы (Речь идет про продольную устойчивость ЛА). Если я не ошибаюсь формула прямолинейного полета, это если при определенной скорости сумма всех моментов действующих в продольной плоскости равна нулю.
Относительно какой точки мерятся все моменты действующие на ЛА? и так далее.
Как это всё закладывается в XFLR5?
Так же если я не понимаю чего-то в этом, то можете посоветовать доступную для «чайников» литературу, в которой это можно прочесть и разобраться.
Здравствуйте, Александр.
Верно, расположение центра тяжести влияет на продольную статическую устойчивость модели самолета. Чтобы самолет был устойчивее, центр тяжести сдвигают вперед. Стрела, выпущенная из лука — хороший пример устойчивости в аэродинамике.
Масса влияет на траекторию, а не на устойчивость. Например, самолет Можайского мог производить прямолинейный установившийся полет только со снижением в 9 градусов (по исследованиям ЦАГИ). Причиной тому было неудачное соотношение веса двигателей к их мощности.
Прямолинейный установившийся полет — это движение модели по инерции, то есть, да, верно — она находится в равновесии. В полете на самолет может подействовать либо порыв набегающего ветра, тогда изменится скорость, либо под углом и тогда изменится угол атаки. В обоих случаях самолет получит дополнительную подъемную силу и, если он устойчив, вернется к прямолинейному полету (придет в равновесие).
В XFLR5 точка, относительно которой измеряются моменты для самолета, задается пользователем в виде ЦТ (CoG). Она соответствует CoG (центру тяжести самолета). См. Guidelines.pdf на стр.43 есть таблица. XCmRef в 2009-м году была переименована в CoG, а потом и программа QFLR5 была переименована в XFLR5.
Перемещая ЦТ модели, можно найти такую позицию, когда момент не будет зависеть от угла атаки. Средний рисунок на стр.9 здесь.
Слева от этого рисунка — модель устойчива, справа — нет (производная Cm по углу атаки больше нуля).
Что касается книг, попробуйте ознакомиться с книгами по практической аэродинамике:
Л.Е.Богословский — Практическая аэродинамика самолета Ан-24 (Глава V);
П.Т.Бехтир, В.П.Бехтир — Практическая аэродинамика самолета Ил-76.
С математикой в этих книгах проще, чем в специализированной литературе по динамике полета.