

Рассматривается гидроцилиндр с обратной связью в Amesim. Гидроцилиндр поднимает груз вертикально на высоту, задаваемую управляющим сигналом, подаваемым на пропорциональный кран. При достижении определенной высоты, сигнал становится нулевым и груз удерживается при помощи гидравлического замка.
1 Общие сведения о схеме
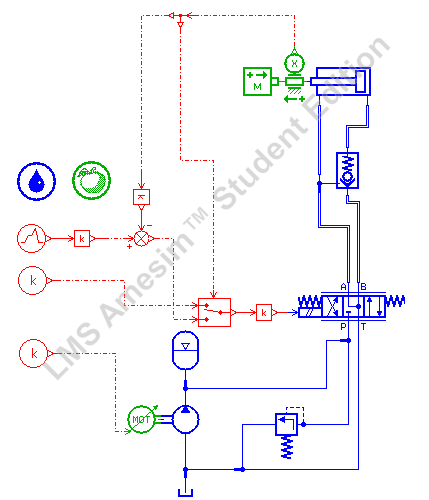
Я выделил все компоненты модели и включил для них метки. Вот, из чего состоит модель:
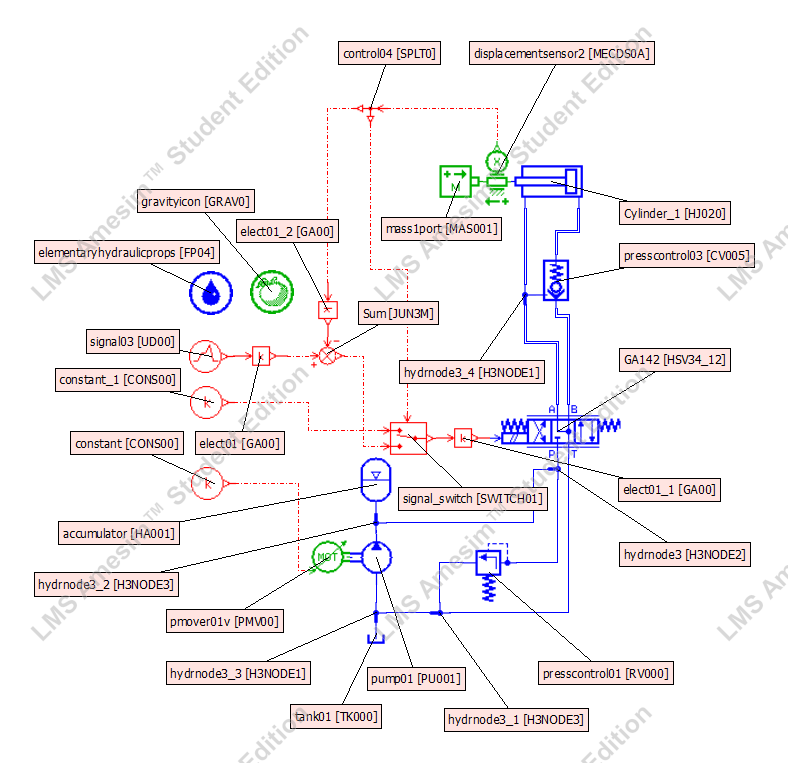
Источником давления в рассматриваемой схеме является насос pump01, приводимый в действие мотором pmover01v. Константа constant определяет частоту вращения мотора, а значит и подачу насоса в единицу времени.
Цилиндр в исходном положении сжат грузом (шток убран), то есть груз лежит на цилиндре сверху. Ориентация груза определяется блоком mass1port. Точнее, его параметром inclination.
Насос нагнетает давление в гидроаккумулятор accumulator. Предохранительный клапан presscontrol01 сработает при достижении давлением уровня в 60 Бар.
Управление положением груза осуществляется за счет регулирования положения золотника пропорционального клапана GA142. Форма управляющего сигнала показана на рисунке в разделе Результаты моделирования.
Кран GA142, используемый в нашей системе, называется так не вполне заслуженно. На самом деле, настоящий ГА142 не является пропорциональным краном и не является краном прямого действия. Подходит только схема обозначения позиций золотника. Кран трехпозиционный и четырехходовой.
Обратную связь обеспечивает датчик положения штока displacementsensor2. Его сигнал в блоке Sum вычитается из сигнала управления. При достижении требуемого положения штока, сигнал будет нулевым.
Блок signal_switch выполняет переключение управления соленоидом на нулевой сигнал константы constant_1 при достижении определенного положения штока. См. параметр switch_threshold блока signal_switch.
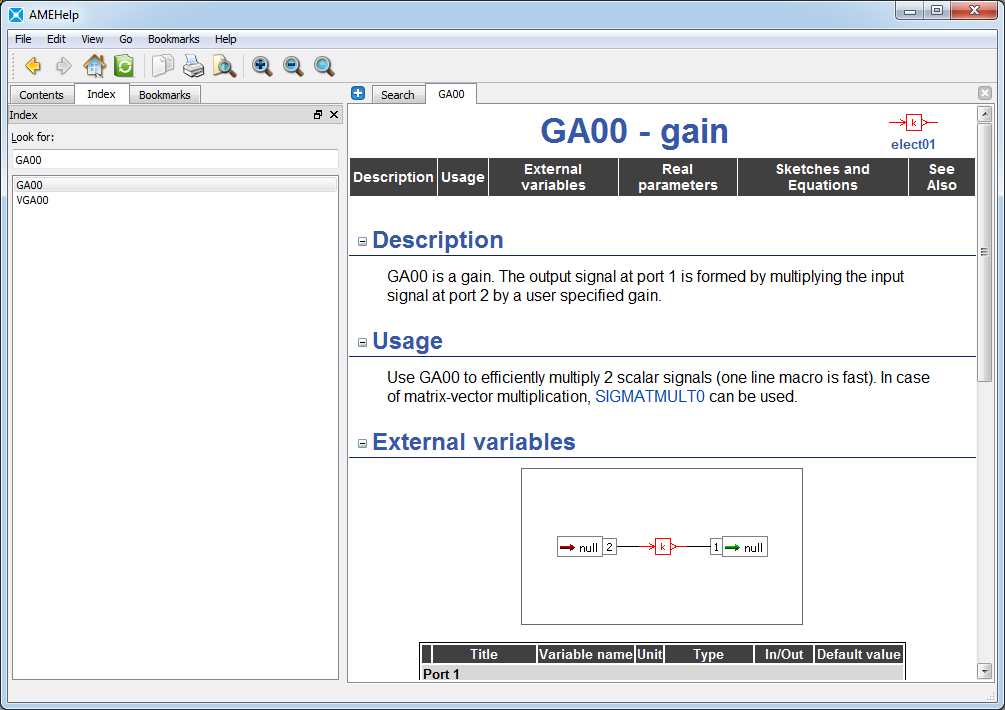
Гейн elect01_1 при значениях меньше 50 не даёт сходимости к позиции, заданной управляющим сигналом. Попробуйте поменять например, на 10. Шток не дойдет до отметки 20 см. Переключатель signal_switch не сработает, и когда управляющий сигнал начнет снижаться, груз сместится вниз и сожмет цилиндр в исходное положение.
2 Результаты моделирования
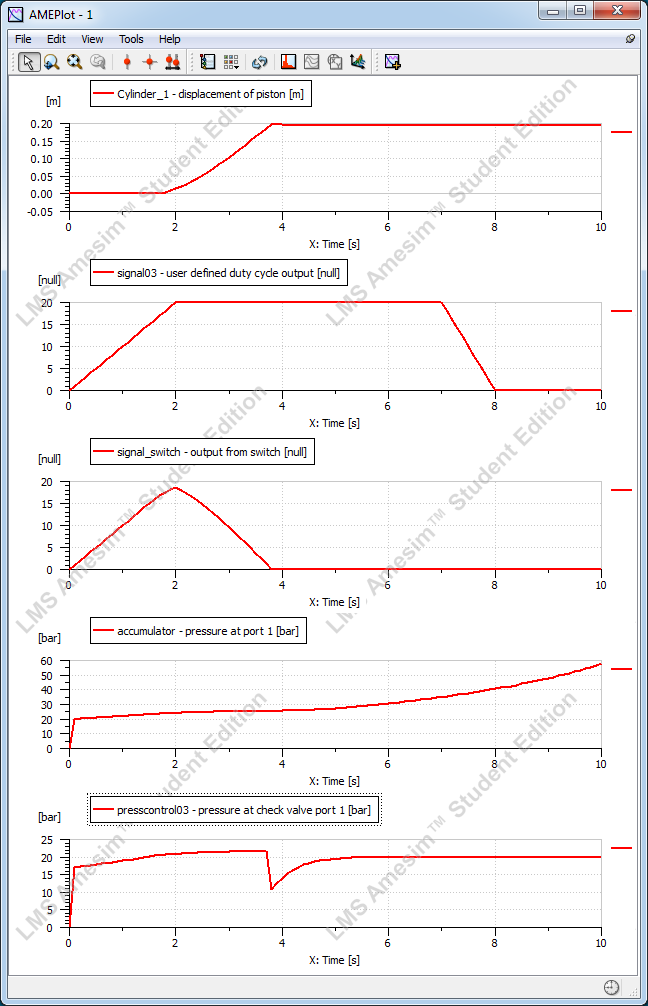
По графику исходного управляющего сигнала (№2) видно, что от гидроцилиндра требуется выдвинуться за 2 секунды на 20 см, затем удерживать позицию до 7-й секунды и далее, за 1 секунду опуститься до нуля.
Настройка signal_switch такова, что управление переключится с указанного алгоритма на нулевой сигнал и груз повиснет на гидрозамке при выходе штока, равном 0,195 м (т.е. 19,5 см). Включение в работу гидрозамка видно в момент 3,6 с на графике №5.
Давление в гидроаккумуляторе всегда растет, значит расход на работу с грузом не потребляет весь расход насосной станции. Поэтому пердохранительный клапан поставлен к месту. Иначе трубопроводы бы разрушились при неудачном (например, слишком длительном) исходном управляющем сигнале.
3 Полезные заметки
- Обратите внимание на то, что трубы показаны разным стилем линий. Утолщенные трубопроводы имеют более сложную субмодель. При назначении Premier Submodel в Submodel mode, Amesim выбирает нужную субмодель для трубопровода. Например, субмодель Direct соединяет два штуцера напрямую, то есть, без трубы.
- Создать отчет о модели можно при помощи команды File — Create HTML Report… Отчет очень помогает при сравнении моделей во время отладки. Он содержит описание и перечисление параметров для каждого элемента модели.
- Метки Вы можете отобразить так: ПКМ на элементе модели — Labels — Show Component Labels. Метку можно повернуть: ПКМ на метке — Rotate label.
- То, что указано на метках в квадртных скобках, можно искать в справке. То же самое окно открывается при вызове справки из контекстного меню после щелчка ПКМ на агрегате схемы.
- Команда Modeling — Alias List отобразит все элементы, их псевдонимы (Alias) и назначенные им субмодели. Будут перечислены даже трубопроводы и их субмодели. В списке можно щелкнуть на элемент, и он подсветится в графическом окне Amesim.
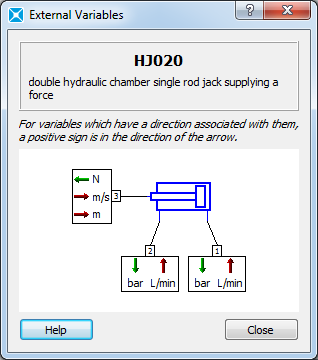
- Многие элементы схемы имеют внешние переменные с направлением, то есть например, поток в гидроцилиндр счтается положительным, а из него — отрицательным. Вы можете выполнить команду ПКМ на элементе — Show Details — [Кнопка] External Variables. Она покажет положительное направление переменных для того блока, на котором Вы кликнули ПКМ.
- Пара слов о построении графиков. Включите режим Simulation Mode. В этом режиме, для построения графиков, достаточно просто выделить нужный элемент модели и перетащить одну из его переменных в графическое поле Amesim. Возможны комбинации. То есть, на один график и в одно окно с графиком можно перетаскивать несколько переменных.
4 Свойства гидрожидкости
При высокоскоростных динамических характеристиках гидравлической системы, возможно влияние растворенного в жидкости газа на процесс. Это может проявляться в виде ненормального расхода на штуцерах гидроцилиндра. Например, если график расхода входящей в одну полость цилиндра жидкостью и выходящей из другой полости выглядят непохожими. При идеальном поведении жидкости, отличаться должны только пропорции расходов. Это из-за разницы объёмов штоковой и поршневой полости.
Если необходимо, Вы можете выбрать применяемую модель гидрожидкости в настройках блока elementaryhydraulicprops.
5 Файлы для скачивания
- Скачать модель CheckValvePosControl-AMESim.
- Скачать Отчет CheckValvePosControl02.